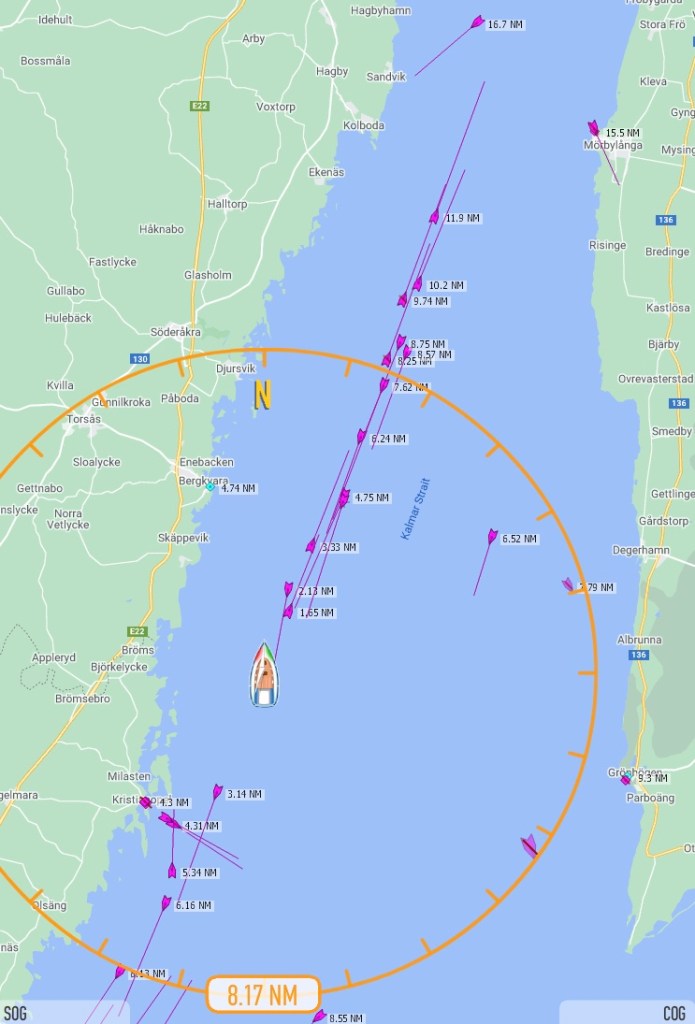
Det är mellan tre och åtta sjömil brett mellan Öland och fastlandet, i det avsnitt bilden visar.
Även på den tid alla höll kursen med hjälp av kompassen var båtarna ganska samlade kring ”den optimala” färdvägen. Men tack vare att kompasserna inte var så exakta blev det en spridning på båtarna.
Med en plotter lägger många ut kurslinjen från ostmärket Yttre Kullen i söder till Skansgrundet vid inloppet till Kalmar. Det är en spikrak linje på 30 sjömil.
Om man då även kopplar in autopiloten, vilket många gör, så följer båten denna linje med bara ett 20-tal meters felmarginal. Även om man styr manuellt så strävar man att efter ”att hålla sig på linjen”.
Ska tilläggas att väldigt många väljer att trycka på Start-knappen till dieseln, istället för att börja kryssa. Det ökar antalet som håller sig till kurslinjen. På bilden ser man att 67 procent (8 av 12) av segelbåtarna använde motorn. (Jag har räknat bort de två motorbåtarna). Det blåste mellan 3 och 5 m/s vid tillfället.
Konsekvensen av detta blir, som framgår av bilden, att man måste väja stup i kvarten. Samtidigt är det ju trevligt, man får ju tillfälle att vinka till många andra båtfarare 😀

